PUBLICATIONS
[1] Sun X, Xu T, Zhang J, et al. A Hierarchical Framework Combining Motion and Feature Information for Infrared-Visible Video Registration [J]. Sensors, 2017, 17(2):384. (linked)
Abstract: In this paper, we propose a novel hierarchical framework that combines motion and feature information to implement infrared-visible video registration on nearly planar scenes. In contrast to previous approaches, which involve the direct use of feature matching to find the global homography, the framework adds coarse registration based on the motion vectors of targets to estimate scale and rotation prior to matching. In precise registration based on keypoint matching, the scale and rotation are used in re-location to eliminate their impact on targets and keypoints. To strictly matchthe keypoints, first, we improve the quality of keypoint matching by using normalized location descriptors and descriptors generated by the histogram of edge orientation. Second, we remove most mismatches by counting the matching directions of correspondences. We tested our framework on a public dataset, where our proposed framework outperformed two recently-proposed state-of-the-art global registration methods in almost all tested videos.
Pictures:











[2] Sun X, Xu T, Zhang J, et al. An Automatic Multi-Target Independent Analysis Framework for Non-Planar Infrared-Visible Registration [J]. Sensors, 2017, 17(8):1696.(linked)
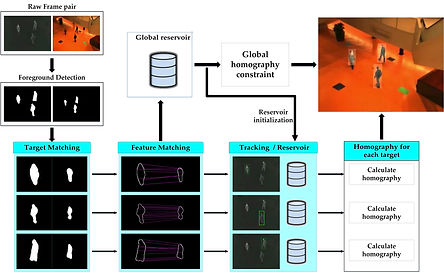
Abstract: In this paper, we propose a novel automatic multi-target registration framework for non-planar infrared-visible videos. Previous approaches usually analyzed multiple targets together and then estimated a global homography for the whole scene, however, these cannot achieve precise multi-target registration when the scenes are non-planar. Our framework is devoted to solving the problem using feature matching and multi-target tracking. The key idea is to analyze and register each
target independently. We present a fast and robust feature matching strategy, where only the features on the corresponding foreground pairs are matched. Besides, new reservoirs based on the Gaussian criterion are created for all targets, and a multi-target tracking method is adopted to determine the relationships between the reservoirs and foreground blobs. With the matches in the corresponding reservoir, the homography of each target is computed according to its moving state. We tested our framework on both public near-planar and non-planar datasets. The results demonstrate that the proposed framework outperforms the state-of-the-art global registration method and the manual global registration matrix in all tested datasets.
Pictures: